Learning athletic humanoid tennis skills from imperfect human motion data
LATENT enables the simulation of highly-dynamic tennis rallies by human athletes, showcasing versatile skills in a competitive environment. Developed by researchers from Tsinghua University, Peking University, and other institutions, it utilizes advanced AI techniques for real-time performance.
zzk273.github.io
1 min
3/15/2026
Neural Boids
Noids, or neural boids, utilize a small neural network to generate steering forces based on visual input from each agent, comprising 1,922 learned parameters. This system mimics the behavior of real birds in a murmuration, where no leader or predetermined choreography directs the movement of the flock.
campedersen.com
10 min
3/8/2026
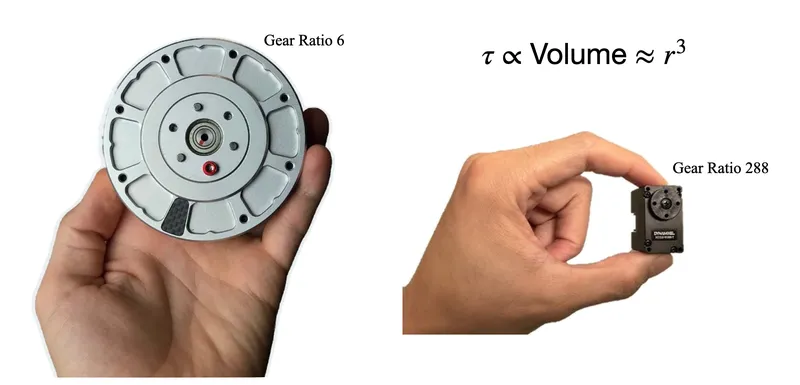
The Robotic Dexterity Deadlock
Robot dexterity is hindered by challenges related to high-ratio gearboxes, which negatively impact simulation-to-reality transfer and force transparency. These gearboxes are also prone to wear and tear, affecting overall robot performance.
origami-robotics.com
17 min
2/27/2026
Learning athletic humanoid tennis skills from imperfect human motion data
LATENT enables the simulation of highly-dynamic tennis rallies by human athletes, showcasing versatile skills in a competitive environment. Developed by researchers from Tsinghua University, Peking University, and other institutions, it utilizes advanced AI techniques for real-time performance.
zzk273.github.io
1 min
3/15/2026
The Robotic Dexterity Deadlock
Robot dexterity is hindered by challenges related to high-ratio gearboxes, which negatively impact simulation-to-reality transfer and force transparency. These gearboxes are also prone to wear and tear, affecting overall robot performance.
origami-robotics.com
17 min
2/27/2026
Neural Boids
Noids, or neural boids, utilize a small neural network to generate steering forces based on visual input from each agent, comprising 1,922 learned parameters. This system mimics the behavior of real birds in a murmuration, where no leader or predetermined choreography directs the movement of the flock.
campedersen.com
10 min
3/8/2026
Learning athletic humanoid tennis skills from imperfect human motion data
LATENT enables the simulation of highly-dynamic tennis rallies by human athletes, showcasing versatile skills in a competitive environment. Developed by researchers from Tsinghua University, Peking University, and other institutions, it utilizes advanced AI techniques for real-time performance.
zzk273.github.io
1 min
3/15/2026
Neural Boids
Noids, or neural boids, utilize a small neural network to generate steering forces based on visual input from each agent, comprising 1,922 learned parameters. This system mimics the behavior of real birds in a murmuration, where no leader or predetermined choreography directs the movement of the flock.
campedersen.com
10 min
3/8/2026
The Robotic Dexterity Deadlock
Robot dexterity is hindered by challenges related to high-ratio gearboxes, which negatively impact simulation-to-reality transfer and force transparency. These gearboxes are also prone to wear and tear, affecting overall robot performance.
origami-robotics.com
17 min
2/27/2026
No more articles to load