Humanoid Robot Actuators
firgelli.com
May 4, 2026
47 min read
🔥🔥🔥🔥🔥
56/100
Summary
Humanoid robots take approximately 5,000 steps per hour, with each step generating forces of 2–3 times the robot's body weight through the leg actuators. This high duty cycle leads to actuator failures, prompting engineers to adopt similar solutions to enhance durability.
Key Takeaways
- A humanoid robot takes approximately 5,000 steps per hour, resulting in over one million load cycles on its leg actuators within a month of operation.
- Each step exerts a shock of 2–3 times the robot's body weight on the actuators, leading to high failure rates due to fatigue from repeated impacts.
- Actuators must be designed with back-drivability to absorb shock energy, as traditional self-locking mechanisms can lead to immediate shear failure.
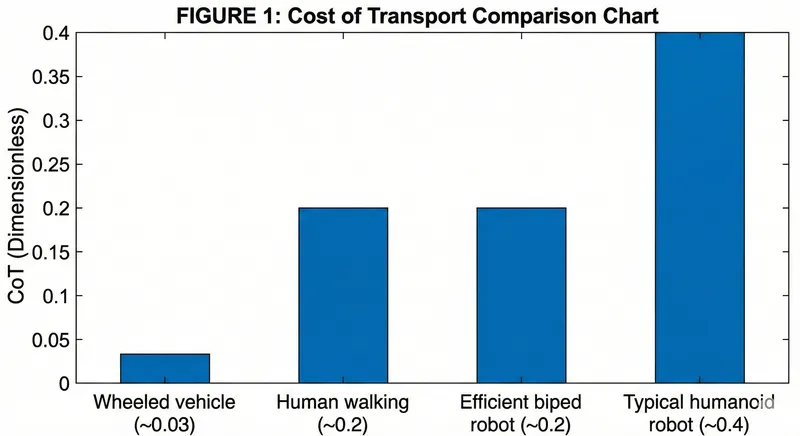
- The Cost of Transport (CoT) for bipedal robots is significantly higher (0.2 to 0.5) compared to wheeled vehicles (0.01 to 0.05), making weight reduction in actuators critical for efficiency.
Community Sentiment
Positives
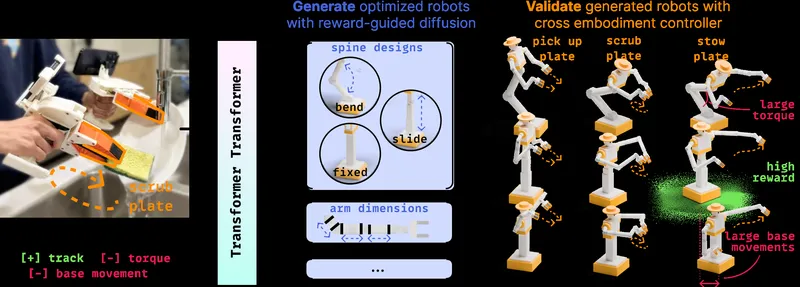
- Legged robots can dynamically balance themselves, offering advantages in environments designed for human locomotion, which could enhance their deployment in real-world scenarios.
Concerns
- The article's illustrations are poorly designed and mechanically nonsensical, leading to confusion about the concepts being presented.
- Concerns about the credibility of the article arise when the writer is represented by an AI avatar, undermining trust in the information provided.
- The complexity of adding brakes to robot joints raises questions about their practicality and impact on dynamic balancing, which is crucial for effective locomotion.